
Page 60 - 79
P. 60
Загальні теореми динаміки
В розділі “Статика” (§ 10 і 11) на підставі того, що сила є
вектором, були введені і в подальшому широко використані
поняття моменту сили відносно точки і відносно осі. Кількість
руху матеріальної точки є також вектором, отже, аналогічно
можна визначити його момент відносно центра і відносно осі.
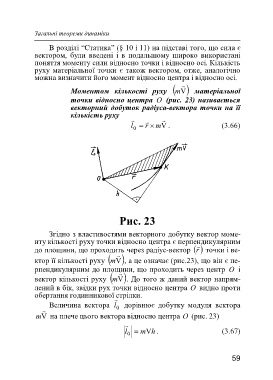
Моментом кількості руху Vm матеріальної
точки відносно центра O (рис. 23) називається
векторний добуток радіуса-вектора точки на її
кількість руху
l r m V . (3.66)
0
Рис. 23
Згідно з властивостями векторного добутку вектор моме-
нту кількості руху точки відносно центра є перпендикулярним
до площини, що проходить через радіус-вектор r точки і ве-
ктор її кількості руху Vm , а це означає (рис.23), що він є пе-
рпендикулярним до площини, що проходить через центр O і
вектор кількості руху Vm . До того ж даний вектор напрям-
лений в бік, звідки рух точки відносно центра O видно проти
обертання годинникової стрілки.
Величина вектора l дорівнює добутку модуля вектора
0
m V на плече цього вектора відносно центра O (рис. 23)
l mV h . (3.67)
0
59