
Page 323 - 79
P. 323
Теоретична механіка. Динаміка
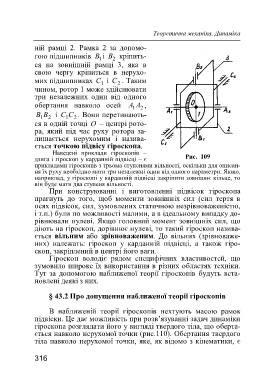
ній рамці 2. Рамка 2 за допомо-
гою підшипників B і B кріпить-
2
1
ся на зовнішній рамці 3, яка в
свою чергу кріпиться в нерухо-
мих підшипниках C і C . Таким
2
1
чином, ротор 1 може здійснювати
три незалежних один від одного
обертання навколо осей A 1 A ,
2
B B і C C . Вони перетинають-
1 2 1 2
ся в одній точці O – центрі рото-
ра, який під час руху ротора за-
лишається нерухомим і назива-
ється точкою підвісу гіроскопа.
Наведені приклади гіроскопів –
дзига і гіроскоп у карданній підвісці – є Рис. 109
прикладами гіроскопів з трьома ступенями вільності, оскільки для описан-
ня їх руху необхідно мати три незалежні один від одного параметри. Якщо,
наприклад, у гіроскопі у карданній підвісці закріпити зовнішнє кільце, то
він буде мати два ступеня вільності.
При конструюванні і виготовленні підвісок гіроскопа
прагнуть до того, щоб моменти зовнішніх сил (сил тертя в
осях підвісок, сил, зумовлених статичною незрівноваженістю,
і т.п.) були по можливості малими, а в ідеальному випадку до-
рівнювали нулеві. Якщо головний момент зовнішніх сил, що
діють на гіроскоп, дорівнює нулеві, то такий гіроскоп назива-
ється вільним або зрівноваженим. До вільних (зрівноваже-
них) належать: гіроскоп у карданній підвісці, а також гіро-
скоп, закріплений в центрі його ваги.
Гіроскоп володіє рядом специфічних властивостей, що
зумовило широке їх використання в різних областях техніки.
Тут за допомогою наближеної теорії гіроскопів будуть вста-
новлені деякі з них.
§ 43.2 Про допущення наближеної теорії гіроскопів
В наближеній теорії гіроскопів нехтують масою рамок
підвіски. Це дає можливість при розв’язуванні задач динаміки
гіроскопа розглядати його у вигляді твердого тіла, що оберта-
ється навколо нерухомої точки (рис.110). Обертання твердого
тіла навколо нерухомої точки, яке, як відомо з кінематики, є
316