
Page 320 - 79
P. 320
Деякі спеціальні питання динаміки
Рівняння (3.297) є загальним
розв’язком системи диференціа-
льних рівнянь (3.296) для вказа-
ного часткового випадку, коли
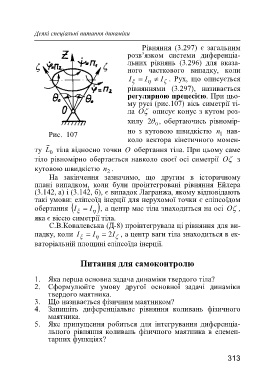
I I I . Рух, що описується
рівняннями (3.297), називається
регулярною прецесією. При цьо-
му русі (рис.107) вісь симетрії ті-
ла O описує конус з кутом роз-
хилу 2 , обертаючись рівномір-
0
но з кутовою швидкістю n нав-
Рис. 107 1
коло вектора кінетичного момен-
ту L тіла відносно точки O обертання тіла. При цьому саме
0
тіло рівномірно обертається навколо своєї осі симетрії O з
кутовою швидкістю n .
2
На закінчення зазначимо, що другим в історичному
плані випадком, коли були проінтегровані рівняння Ейлера
(3.142, а) і (3.142, б), є випадок Лагранжа, якому відповідають
такі умови: еліпсоїд інерції для нерухомої точки є еліпсоїдом
обертання I I , а центр мас тіла знаходиться на осі O ,
яка є віссю симетрії тіла.
С.В.Ковалевська (Д-8) проінтегрувала ці рівняння для ви-
падку, коли I I I 2 , а центр ваги тіла знаходиться в ек-
ваторіальній площині еліпсоїда інерції.
Питання для самоконтролю
1. Яка перша основна задача динаміки твердого тіла?
2. Сформулюйте умову другої основної задачі динаміки
твердого маятника.
3. Що називається фізичним маятником?
4. Запишіть диференціальне рівняння коливань фізичного
маятника.
5. Яке припущення робиться для інтегрування диференціа-
льного рівняння коливань фізичного маятника в елемен-
тарних функціях?
313