
Page 163 - 79
P. 163
Загальні теореми динаміки
r r AB ,
B
A
проваріювавши яку, матимемо
r r AB ,
A
B
де ABAB , оскільки відстань між точками не змінюється
AB const
Враховуючи сказане, рівність a набуває вигляду
A R r R r R r R r AB
1 A 1 B 1 A 1 A
R r R r R RAB 0AB ,
1 A 1 A 1 1
оскільки AB і R взаємно перпендикулярні.
1
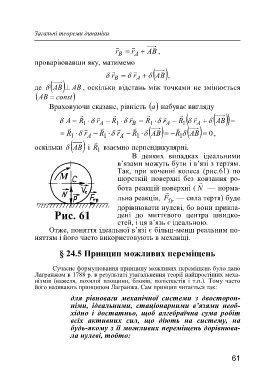
В деяких випадках ідеальними
в’язами можуть бути і в’язі з тертям.
Так, при коченні колеса (рис.61) по
шорсткій поверхні без ковзання ро-
бота реакцій поверхні ( N — норма-
льна реакція, F — сила тертя) буде
Tp
дорівнювати нулеві, бо вони прикла-
Рис. 61 дені до миттєвого центра швидко-
стей, і ця в’язь є ідеальною.
Отже, поняття ідеальної в’язі є більш-менш реальним по-
няттям і його часто використовують в механіці.
§ 24.5 Принцип можливих переміщень
Сучасне формулювання принципу можливих переміщень було дано
Лагранжом в 1788 р. в результаті узагальнення теорії найпростіших меха-
нізмів (важеля, похилої площини, блоків, поліспастів і т.п.). Тому часто
його називають принципом Лагранжа. Сам принцип читається так:
для рівноваги механічної системи з двосторон-
німи, ідеальними, стаціонарними в’язями необ-
хідно і достатньо, щоб алгебраїчна сума робіт
всіх активних сил, що діють на систему, на
будь-якому з її можливих переміщень дорівнюва-
ла нулеві, тобто:
61