
Page 159 - 79
P. 159
Загальні теореми динаміки
В наведеному прикладі (рис. 58) при такому припущенні
r 0 , і можливі переміщення знаходяться в горизонтальній
3
площині.
Дійсне переміщення матеріального об’єкта співпадає з
одним з можливих його переміщень тільки у випадку, коли на
об’єкт накладені стаціонарні в’язі. У випадку нестаціонарних
в’язей дійсне переміщення необов’язково співпадатиме з од-
ним з можливих переміщень.
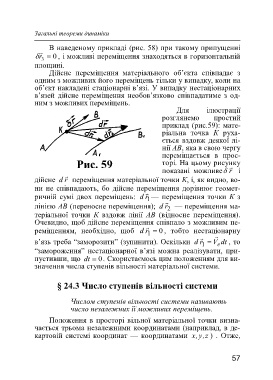
Для ілюстрації
розглянемо простий
приклад (рис.59): мате-
ріальна точка К руха-
ється вздовж деякої лі-
нії АВ, яка в свою чергу
переміщається в прос-
Рис. 59 торі. На цьому рисунку
показані можливе r і
дійсне rd переміщення матеріальної точки К, і, як видно, во-
ни не співпадають, бо дійсне переміщення дорівнює геомет-
r
ричній сумі двох переміщень: d — переміщення точки К з
1
лінією АВ (переносне переміщення); rd 2 — переміщення ма-
теріальної точки К вздовж лінії АВ (відносне переміщення).
Очевидно, щоб дійсне переміщення співпало з можливим пе-
реміщенням, необхідно, щоб d r 1 0 , тобто нестаціонарну
в’язь треба “заморозити” (зупинити). Оскільки rd 1 V e dt , то
“замороження” нестаціонарної в’язі можна реалізувати, при-
пустивши, що dt 0. Скористаємось цим положенням для ви-
значення числа ступенів вільності матеріальної системи.
§ 24.3 Число ступенів вільності системи
Числом ступенів вільності системи називають
число незалежних її можливих переміщень.
Положення в просторі вільної матеріальної точки визна-
чається трьома незалежними координатами (наприклад, в де-
картовій системі координат — координатами ,x z , y ) . Отже,
57