
Page 62 - 68
P. 62
Теоретична механіка
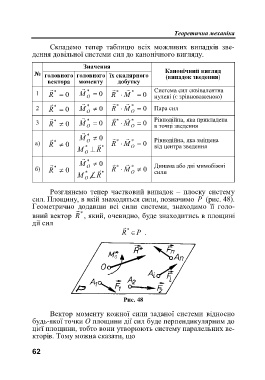
Складемо тепер таблицю всіх можливих випадків зве-
дення довільної системи сил до канонічного вигляду.
Значення
Канонічний вигляд
№ головного головного їх скалярного (випадок зведення)
вектора моменту добутку
1 R * 0 M * O 0 R * M * 0 Система сил еквівалентна
нулеві (є зрівноваженою)
2 R * 0 M * O 0 R * M * O 0 Пара сил
3 R * 0 M * O 0 R * M * O 0 Рівнодійна, яка прикладена
в точці зведення
M * 0
а) R * 0 O R * M * O 0 Рівнодійна, яка зміщена
від центра зведення
*
*
M R
O
M * 0
б) R * 0 O R * M * O 0 Динама або дві мимобіжні
сили
*
*
M R
O
Розглянемо тепер частковий випадок – плоску систему
сил. Площину, в якій знаходяться сили, позначимо P (рис. 48).
Геометрично додавши всі сили системи, знаходимо її голо-
*
вний вектор R , який, очевидно, буде знаходитись в площині
дії сил
*
R P .
Рис. 48
Вектор моменту кожної сили заданої системи відносно
будь-якої точки О площини дії сил буде перпендикулярним до
цієї площини, тобто вони утворюють систему паралельних ве-
кторів. Тому можна сказати, що
62