
Page 228 - 68
P. 228
Теоретична механіка
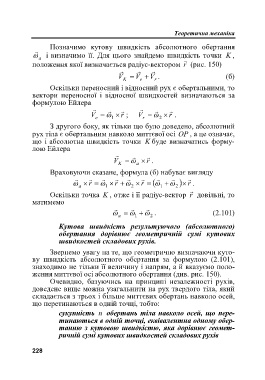
Позначимо кутову швидкість абсолютного обертання
і визначимо її. Для цього знайдемо швидкість точки K ,
a
положення якої визначається радіус-вектором r (рис. 150)
V V V . (б)
K
r
e
Оскільки переносний і відносний рух є обертальними, то
вектори переносної і відносної швидкостей визначаються за
формулою Ейлера
V 1 r ; V 2 r .
e
r
З другого боку, як тільки що було доведено, абсолютний
рух тіла є обертальним навколо миттєвої осі OP , а це означає,
що і абсолютна швидкість точки K буде визначатись форму-
лою Ейлера
V r .
K a
Враховуючи сказане, формула (б) набуває вигляду
r r r r .
a 1 2 1 2
Оскільки точка K , отже і її радіус-вектор r довільні, то
матимемо
. (2.101)
a 1 2
Кутова швидкість результуючого (абсолютного)
обертання дорівнює геометричній сумі кутових
швидкостей складових рухів.
Звернемо увагу на те, що геометрично визначаючи куто-
ву швидкість абсолютного обертання за формулою (2.101),
знаходимо не тільки її величину і напрям, а й вказуємо поло-
ження миттєвої осі абсолютного обертання (див. рис. 150).
Очевидно, базуючись на принципі незалежності рухів,
доведене вище можна узагальнити на рух твердого тіла, який
складається з трьох і більше миттєвих обертань навколо осей,
що перетинаються в одній точці, тобто:
сукупність n обертань тіла навколо осей, що пере-
тинаються в одній точці, еквівалентна одному обер-
танню з кутовою швидкістю, яка дорівнює геомет-
ричній сумі кутових швидкостей складових рухів
228