
Page 185 - 68
P. 185
Кінематика
стю , маючи в даний мо-
мент кутове пришвидшення
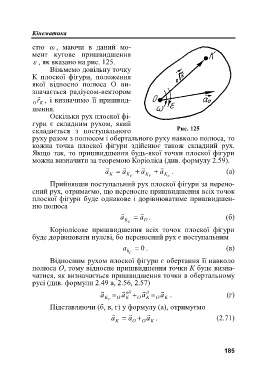
, як вказано на рис. 125.
Візьмемо довільну точку
К плоскої фігури, положення
якої відносно полюса О ви-
значається радіусом-вектором
K
0 r , і визначимо її пришвид-
шення.
Оскільки рух плоскої фі-
гури є складним рухом, який
складається з поступального Рис. 125
руху разом з полюсом і обертального руху навколо полюса, то
кожна точка плоскої фігури здійснює також складний рух.
Якщо так, то пришвидшення будь-якої точки плоскої фігури
можна визначити за теоремою Коріоліса (див. формулу 2.59).
a a K e a K r a K c . (а)
K
Прийнявши поступальний рух плоскої фігури за перено-
сний рух, отримаємо, що переносне пришвидшення всіх точок
плоскої фігури буде однакове і дорівнюватиме пришвидшен-
ню полюса
a K e a . (б)
O
Коріолісове пришвидшення всіх точок плоскої фігури
буде дорівнювати нулеві, бо переносний рух є поступальним
a 0 . (в)
k c
Відносним рухом плоскої фігури є обертання її навколо
полюса О, тому відносне пришвидшення точки К буде визна-
чатися, як визначається пришвидшення точки в обертальному
русі (див. формули 2.49 а, 2.56, 2.57)
об
д
a K r O a O a O a . (г)
K
K
K
Підставляючи (б, в, г) у формулу (а), отримуємо
a a a . (2.71)
K O O K
185