
Page 151 - 68
P. 151
Кінематика
або, використовуючи формулу (2.50) і знаючи, що k const ,
матимемо
~
2
d d
~
k k k . (2.52)
dt dt 2
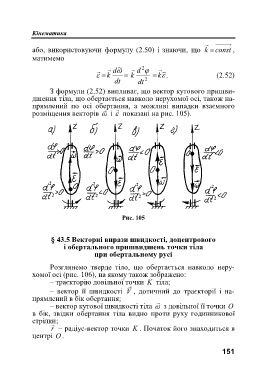
З формули (2.52) випливає, що вектор кутового пришви-
дшення тіла, що обертається навколо нерухомої осі, також на-
прямлений по осі обертання, а можливі випадки взаємного
розміщення векторів і показані на рис. 105).
Рис. 105
§ 43.5 Векторні вирази швидкості, доцентрового
і обертального пришвидшень точки тіла
при обертальному русі
Розглянемо тверде тіло, що обертається навколо неру-
хомої осі (рис. 106), на якому також зображено:
– траєкторію довільної точки K тіла;
– вектор її швидкості V , дотичний до траєкторії і на-
прямлений в бік обертання;
– вектор кутової швидкості тіла з довільної її точки O
в бік, звідки обертання тіла видно проти руху годинникової
стрілки;
r – радіус-вектор точки K . Початок його знаходиться в
центрі O .
151