
Page 150 - 68
P. 150
Теоретична механіка
пришвидшення точок тіла, яке обертається нав-
коло нерухомої осі, дорівнює геометричній сумі її
доцентрового і обертального пришвидшень.
§ 43.4 Вектор кутової швидкості
Для спрощення майбутніх теоретичних викладок зроби-
мо одне припущення. Припустимо, що кутова швидкість – це
вектор.
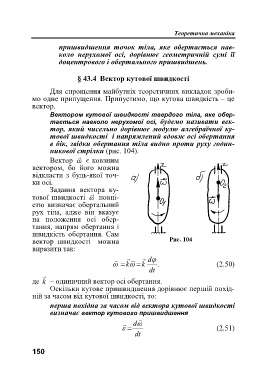
Вектором кутової швидкості твердого тіла, яке обер-
тається навколо нерухомої осі, будемо називати век-
тор, який чисельно дорівнює модулю алгебраїчної ку-
тової швидкості і напрямлений вдовж осі обертання
в бік, звідки обертання тіла видно проти руху годин-
никової стрілки (рис. 104).
Вектор є ковзним
вектором, бо його можна
відкласти з будь-якої точ-
ки осі.
Задання вектора ку-
тової швидкості повні-
стю визначає обертальний
рух тіла, адже він вказує
на положення осі обер-
тання, напрям обертання і
швидкість обертання. Сам
вектор швидкості можна Рис. 104
виразити так:
~ d
k k . (2.50)
dt
де k – одиничний вектор осі обертання.
Оскільки кутове пришвидшення дорівнює першій похід-
ній за часом від кутової швидкості, то:
перша похідна за часом від вектора кутової швидкості
визначає вектор кутового пришвидшення
d
(2.51)
dt
150