
Page 127 - 68
P. 127
Кінематика
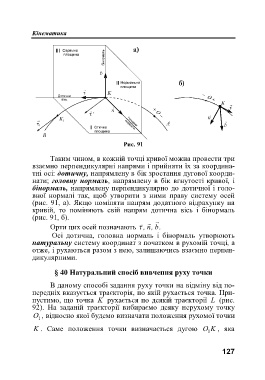
Рис. 91
Таким чином, в кожній точці кривої можна провести три
взаємно перпендикулярні напрями і прийняти їх за координа-
тні осі: дотичну, напрямлену в бік зростання дугової коорди-
нати; головну нормаль, напрямлену в бік вгнутості кривої, і
бінормаль, напрямлену перпендикулярно до дотичної і голо-
вної нормалі так, щоб утворити з ними праву систему осей
(рис. 91, а). Якщо поміняти напрям додатного відрахунку на
кривій, то поміняють свій напрям дотична вісь і бінормаль
(рис. 91, б).
Орти цих осей позначають , . b , n
Осі дотична, головна нормаль і бінормаль утворюють
натуральну систему координат з початком в рухомій точці, а
отже, і рухаються разом з нею, залишаючись взаємно перпен-
дикулярними.
§ 40 Натуральний спосіб вивчення руху точки
В даному способі задання руху точки на відміну від по-
передніх вказується траєкторія, по якій рухається точка. При-
пустимо, що точка K рухається по деякій траєкторії L (рис.
92). На заданій траєкторії вибираємо деяку нерухому точку
O , відносно якої будемо визначати положення рухомої точки
1
K . Саме положення точки визначається дугою O K , яка
1
127