
Page 39 - 6383
P. 39
u u
, xy ,
x x y
x
, , (16.25)
y yz
y y z
u
z . zx .
z x z
Диференціальні залежності (16.25) були отримані Коші. Ці вирази для
компонент деформації отримані в припущенні маленьких переміщень
(лінійних і кутових). Припускається, що квадрати перших похідних переміщень
малі порівняно з лінійними і кутовими деформаціями, а лінійні і кутові деформації
малі порівняно з одиницею. Якщо переміщення u, υ, ω розкласти в ряд Тейлора
і відкинути нелінійні доданки, залишивши тільки лінійні члени, то з розгляду
лінійної частини, що залишилася, можна отримати приведені вище вирази Коші
(16.25) для компонент деформації.
У нелінійній теорії пружності крім лінійних враховуються також і
квадратичні члени розкладання переміщень в ряд Тейлора.
16.2.9. Деформації в точці тіла. Основні деформації
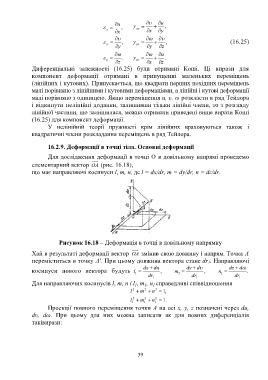
Для дослідження деформації в точці О в довільному напрямі проведемо
елементарний вектор OA (рис. 16.18),
що має направляючі косинуси l, т, п, де l = dx/dr, т = dy/dr, п = dz/dr.
Рисунок 16.18 – Деформація в точці в довільному напрямку
Хай в результаті деформації вектор OA змінив свою довжину і напрям. Точка А
переміститься в точку А'. При цьому довжина вектора стане dr 1. Направляючі
dx du dy d dz d
косинуси нового вектора будуть l , m , n .
1 1 1
dr dr dr
1 1 1
Для направляючих косинусів l, т, п і l 1, т 1, п 1 справедливі співвідношення
l 2 m 2 n 2 , 1
l 2 m 2 n 2 . 1
1 1 1
Проекції повного переміщення точки А на осі х, у, z позначені через du,
dυ, dω. При цьому для них можна записати як для повних диференціалів
таківирази:
39