
Page 90 - 5637
P. 90
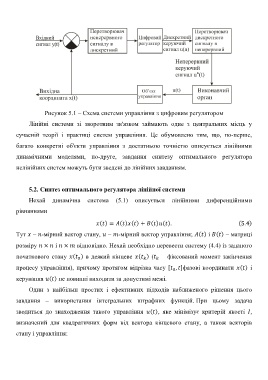
Рисунок 5.1 – Схема системи управління з цифровим регулятором
Лінійні системи зі зворотним зв'язком займають одне з центральних місць у
сучасній теорії і практиці систем управління. Це обумовлено тим, що, по-перше,
багато конкретні об'єкти управління з достатньою точністю описується лінійними
динамічними моделями, по-друге, завдання синтезу оптимального регулятора
нелінійних систем можуть бути зведені до лінійних завданням.
5.2. Синтез оптимального регулятора лінійної системи
Нехай динамічна система (5.1) описується лінійними диференційними
рівняннями
( ) = ( ) ( ) + ( ) ( ). (5.4)
Тут – -мірний вектор стану, – -мірний вектор управління; ( ) і ( ) – матриці
розміру × і × відповідно. Нехай необхідно перевести систему (4.4) із заданого
початкового стану ( ) в деякий кінцеве ( ) ( – фіксований момент закінчення
процесу управління), причому протягом відрізка часу [ , ]фазові координати ( ) і
керування ( ) не повинні виходити за допустимі межі.
Один з найбільш простих і ефективних підходів наближеного рішення цього
завдання – використання інтегральних штрафних функцій. При цьому задача
зводиться до знаходження такого управління ( ), яке мінімізує критерій якості ,
визначений для квадратичних форм від вектора кінцевого стану, а також векторів
стану і управління: