
Page 29 - 5637
P. 29
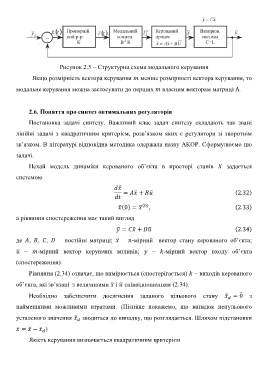
Рисунок 2.5 – Структурна схема модального керування
Якщо розмірність вектора керування менше розмірності вектора керування, то
модальне керування можна застосувати до перших власним векторам матриці Α.
2.6. Поняття про синтез оптимальних регуляторів
Постановка задачі синтезу. Важливий клас задач синтезу складають так звані
лінійні задачі з квадратичним критерієм, розв’язком яких є регулятори зі зворотнім
зв’язком. В літературі відповідна методика одержала назву АКОР. Сформулюємо цю
задачі.
Нехай модель динаміки керованого об’єкта в просторі станів задається
системою
̅
= ̅ + (2.32)
̅(0) = ̅ ( ) , (2.33)
а рівняння спостереження має такий вигляд
= ̅ + (2.34)
де , , , – постійні матриці; ̅ – -мірний вектор стану керованого об’єкта;
– -мірний вектор керуючих впливів; – -мірний вектор входу об’єкта
(спостереження).
Рівняння (2.34) означає, що вимірюється (спостерігається) – виходів керованого
об’єкта, які зв’язані з величинами ̅ і співвідношенням (2.34).
Необхідно забезпечити досягнення заданого цільового стану ̅ = 0 з
найменшими можливими втратами. (Пізніше покажемо, що випадок ненульового
усталеного значення ̅ зводиться до випадку, що розглядається. Шляхом підстановки
̅ = − ̅ )
Якість керування визначається квадратичним критерієм