
Page 23 - 5637
P. 23
Передавальну матрицю регулятора ми вибрали діагональною. Тому для
діагональності ( ) необхідно, щоб виконувалась умова
( ) ( ) ( ) ⇒ ( ) (2.16)
де ( ) – діагональна матриця.
( )
Матрицю ( ) утворимо із матриці ( ) шляхом обнуління її недіагональних
елементів, тобто
( )
( ) = diag ( ) (2.16)
Тепер рівняння (2.16) набуде такого вигляду:
( ) ( )
( ) ( ) = diag ( ) (2.18)
В автоматичній системі керування, коли компенсатор синтезують у відповідності
з (2.18) досягається повна автономність відносно задавленої дії. При цьому
залишається вплив кожного збурення на всі виходи системи. Для компенсації цих
збурень можна синтезувати комбіновану АСР, в якій використовуються додаткові
̅
зв’язки для усунення дії складових вектора ( ) на виходи системи , , … , .
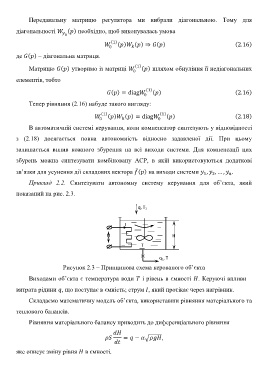
Приклад 2.2. Синтезувати автономну систему керування для об’єкта, який
показаний на рис. 2.3.
q, T 1
I
U H
T
q 1, T
Рисунок 2.3 – Принципова схема керованого об’єкта
Виходами об’єкта є температура води і рівень в ємності . Керуючі впливи –
витрата рідини , що поступає в ємність; струм , який протікає через нагрівник.
Складаємо математичну модель об’єкта, використавши рівняння матеріального та
теплового балансів.
Рівняння матеріального балансу приводить до диференціального рівняння
= − ,
яке описує зміну рівня в ємності.