
Page 20 - 5637
P. 20
рівнянь (2.1), коли відоме початкове значення ( ) , то об’єкт буде спостережливим,
коли за виміряними значеннями ( ) можна обчислити складові вектора ̅ ( ) .
Утворимо матрицю
= [ ⋮ ⋮ ( ) ⋮. . . ⋮ (
) ] (2.9)
і, якщо ранг цієї матриці дорівнює розмірності вектора стану ̅, то об’єкт називають
спостережливим.
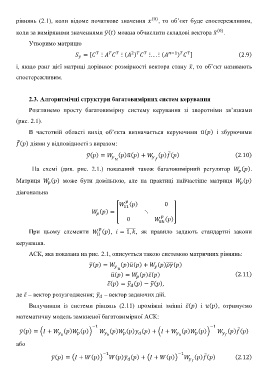
2.3. Алгоритмічні структури багатовимірних систем керування
Розглянемо просту багатовимірну систему керування зі зворотніми зв’язками
(рис. 2.1).
В частотній області вихід об’єкта визначається керуючими ( ) і збурючими
̅
( ) діями у відповідності з виразом:
̅
( ) = ( ) ( ) + ( ) ( ) (2.10)
На схемі (див. рис. 2.1.) показаний також багатовимірний регулятор ( ).
Матриця ( ) може бути довільною, але на практиці найчастіше матриця ( )
діагональна
( ) 0
( ) = ⋱
0 ( )
При цьому елементи ( ), = 1, , як правило задають стандартні закони
керування.
АСК, яка показана на рис. 2.1, описується такою системою матричних рівнянь:
( ) = ( ) ( ) + ( ) ( )
( ) = ( ) ̅( ) (2.11)
̅( ) = ( ) − ( ),
де ̅ – вектор розузгодження; – вектор задаючих дій.
Вилучивши із системи рівнянь (2.11) проміжні змінні ̅( ) і ( ), отримуємо
математичну модель замкненої багатовимірної АСК:
̅
( ) = + ( ) ( ) ( ) ( ) ( ) + + ( ) ( ) ( ) ( )
або
̅
( ) = + ( ) ( ) ( ) + + ( ) ( ) ( ) (2.12)