
Page 122 - 5637
P. 122
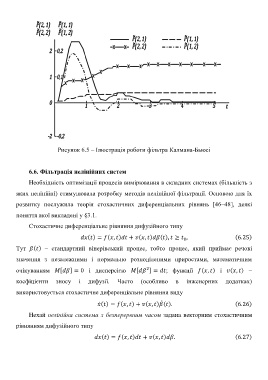
Рисунок 6.5 – Ілюстрація роботи фільтра Калмана-Бьюсі
6.6. Фільтрація нелінійних систем
Необхідність оптимізації процесів вимірювання в складних системах (більшість з
яких нелінійні) стимулювала розробку методів нелінійної фільтрації. Основою для їх
розвитку послужила теорія стохастичних диференціальних рівнянь [46–48], деякі
поняття якої викладені у §3.1.
Стохастичне диференціальне рівняння дифузійного типу
( ) = ( , ) + ( , ) ( ), ≥ , (6.25)
Тут ( ) – стандартний вінерівський процес, тобто процес, який приймає речові
значення з незалежними і нормально розподіленими приростами, математичним
очікуванням [ ] = 0 і дисперсією [ ] = ; функції ( , ) і ( , ) –
коефіцієнти зносу і дифузії. Часто (особливо в інженерних додатках)
використовується стохастичне диференціальне рівняння виду
̇
̇( ) = ( , ) + ( , ) ( ). (6.26)
Нехай нелінійна система з безперервним часом задана векторним стохастичним
рівнянням дифузійного типу
( ) = ( , ) + ( , ) . (6.27)