
Page 31 - 4845
P. 31
теоремою про прискорення точок тіла у плоско-паралельному русі
n
a a a BА a , (2.20)
BА
A
B
n
Нормальне прискорення визначається за формулою а ВА 2 2 l AВ .
При поступальному вертикальному русі повзуна 3 вектор абсолютного
прискорення a завжди буде вертикально напрямлений. Рівняння (2.20)
B
розв’язуємо графічно побудовою плану прискорень.
Позначимо полюс плану прискорень р . Із полюса р , паралельно до
а
а
кривошипа, відкладаємо вектор прискорення точки А довільно вибраної
довжини р а а (рис.2.9,б). Обчислюємо масштабний коефіцієнт
а а А p a a , м с 2 мм .
Відповідно до рівняння (2.20) із кінця вектора прискорення точки А
n
(рис.2.9,в) відкладаємо вектор a ВА паралельно АВ у напрямку від точки В до
n
точки А довжиною an a BА . Кінець цього вектора позначимо n .
2
a
2
Через точку n проводимо пряму перпендикулярно АВ – це лінія дії
2
тангенціального прискорення a (рис.2.9,г).
ВА
Оскільки, вектор абсолютного прискорення точки В завжди
вертикально напрямлений, то із полюса p проводимо вертикальну пряму
а
до перетину з попередньою прямою (рис.2.9,д). Стрілка вектора
тангенціального прискорення a напрямлена до точки В (рис.2.9,д).
ВА
Модулі прискорень a і a
B
ВА
2
2
a = (p a ) b , м/с , a bn 2 , м/с .
ВА
a
a
B
Кутове прискорення ланки 2
-2
a l AB , с . у
BА
2
Якщо умовно перенести вектор a В
AВ
паралельно самому собі у точку В, то він
вкаже на напрям кутового прискорення
2
ланки 2 відносно точки А.
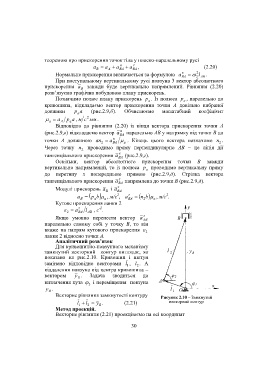
Аналітичний розв’язок
Для кривошипно-повзунного механізму
замкнутий векторний контур виглядає, як l 2 y В
показано на рис.2.10. Кривошип і шатун
замінено відповідно векторами l , l . А
1
2
віддалення повзуна від центра кривошипа –
вектором y . Задача зводиться до φ 2
В
визначення кута і переміщення повзуна А φ 1 х
2
y . l О
1
В
Векторне рівняння замкнутості контуру Рисунок 2.10 – Замкнутий
l l y . (2.21) векторний контур
1
B
2
Метод проекцій.
Векторне рівняння (2.21) проекціюємо на осі координат
30