
Page 18 - 4733
P. 18
1.4. Ввести ці значення в тренажер шляхом натискання кнопки Set.
1.5. Задати режим відображення сигналів на панель під графіками сигналів: увімкнути
поля SpeedPosition і AfterLink, інші поля вимкнути.
1.6. Проаналізувати і зберегти значення амплітуди і форму вихідного сигналу (AfterLink)
у своїх робочих записах.
1.7. Повторити виконання пунктів 1.2 – 1.6, змінюючи значення частоти Frequency від 0,1
до 2,1 Гц з кроком 0,4 Гц.
1.8. Побудувати залежність амплітуди вихідного сигналу від частоти задаючого сигналу
для пропорційної ланки в будь –якій зручній для користувача програмі.
1.9. Зробити висновок про вплив частоти задаючого сигналу на часову характеристику
пропорційної ланки.
2. Дослідити АЧХ пропорційно-диференціальної ланки:
2.1. Задати загальні початкові параметри тренажера (режим роботи: run; вимірюваний
параметр: Position; розмір буфера: 10 с, децимація: 1) і параметри його задаючого сигналу (тип
сигналу: прямокутний; амплітуда: 2 рад; частота: 0,1 Гц; зсув сигналу: 0 рад; частота
дискретизації: 100 Гц), як показано на рис. 1.1.
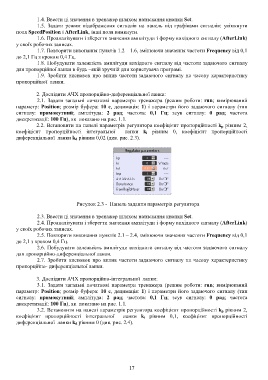
2.2. Встановити на панелі параметрів регулятора коефіцієнт пропорційності k p рівним 2,
коефіцієнт пропорційності інтегральної ланки k і рівним 0, коефіцієнт пропорційності
диференціальної ланки k d рівним 0,02 (див. рис. 2.3).
Рисунок 2.3 - Панель задання параметрів регулятора
2.3. Ввести ці значення в тренажер шляхом натискання кнопки Set.
2.4. Проаналізувати і зберегти значення амплітуди і форму вихідного сигналу (AfterLink)
у своїх робочих записах.
2.5. Повторити виконання пунктів 2.1 – 2.4, змінюючи значення частоти Frequency від 0,1
до 2,1 з кроком 0,4 Гц.
2.6. Побудувати залежність амплітуди вихідного сигналу від частоти задаючого сигналу
для пропорційно-диференціальної ланки.
2.7. Зробити висновок про вплив частоти задаючого сигналу на часову характеристику
пропорційно- диференціальної ланки.
3. Дослідити АЧХ пропорційно-інтегральної ланки:
3.1. Задати загальні початкові параметри тренажера (режим роботи: run; вимірюваний
параметр: Position; розмір буфера: 10 с, децимація: 1) і параметри його задаючого сигналу (тип
сигналу: прямокутний; амплітуда: 2 рад; частота: 0,1 Гц; зсув сигналу: 0 рад; частота
дискретизації: 100 Гц), як показано на рис. 1.1.
3.2. Встановити на панелі параметрів регулятора коефіцієнт пропорційності k p рівним 2,
коефіцієнт пропорційності інтегральної ланки k і рівним 0,1, коефіцієнт пропорційності
диференціальної ланки k d рівним 0 (див. рис. 2.4).
17