
Page 22 - 4733
P. 22
Коефіцієнт пропорційності (підсилення) k – розраховують за значеннями вихідного
сигналуY(t) в усталеному режимі та в початковий момент при подачі вхідного сигналу ( відповідно
Y ( ) і Y ) 0 ( , отриманими з графічного зображення кривої розгону (див. рис. 3.1), та за
максимальним і мінімальним значеннями вхідного сигналу (відповідно X та X ) за
max min
формулою:
Y ( ) Y ) 0 (
k
X X
max min . (3.3)
Значення сталої Т 0 визначається за графіком кривої розгону як час, протягом якого
вихідний сигнал досягає значення, рівного 0,632Y(), тобто
Y (T ) , 0 632Y ( )
o .
(3.4)
Точність розрахованої передавальної функції об’єкта керування оцінюється шляхом
порівняння ідеального вихідного сигналу Y( t) з сигналом, отриманим при встановленні для
ідеал
об’єкта даної передавальної функції (tY ). Розраховується похибка розрахунку за формулою
Y (t ) Y (t )
ідеал 100 %
Y (t )
(3.5)
2. Порядок виконання роботи:
Зайти за допомогою веб-переглядача на адресу www.vlab.nung.edu.ua/SAC.
2.1. Задати загальні параметри тренажера (режим роботи: run; вимірюваний
параметр:Speed; розмір буфера: 10 с, децимація: 1) і параметри його задаючого (генерованого)
сигналу (тип сигналу: прямокутний; амплітуда: 2 рад; частота: 0,1 Гц; зсув сигналу: 0 рад;
частота дискретизації: 100 Гц), як показано на рис. 3.2.
Рисунок 3.2 - Панель задання загальних параметрів тренажера
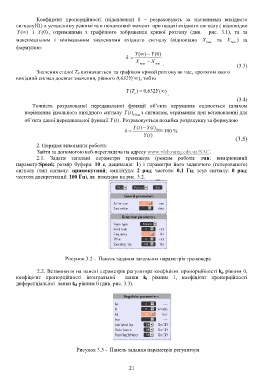
2.2. Встановити на панелі параметрів регулятора коефіцієнт пропорційності k p рівним 0,
коефіцієнт пропорційності інтегральної ланки k і рівним 1, коефіцієнт пропорційності
диференціальної ланки k d рівним 0 (див. рис. 3.3).
Рисунок 3.3 - Панель задання параметрів регулятора
21