
Page 23 - 4733
P. 23
2.3. Ввести ці значення в тренажер шляхом натискання кнопки Set.
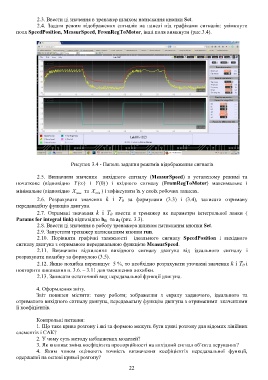
2.4. Задати режим відображення сигналів на панелі під графіками сигналів: увімкнути
поля SpeedPosition, MeasurSpeed, FromRegToMotor, інші поля вимкнути (рис.3.4).
Рисунок 3.4 - Панель задання режимів відображення сигналів
2.5. Визначити значення вихідного сигналу (MeasurSpeed) в усталеному режимі та
початкове (відповідно Y ( ) і Y ) 0 ( ) і вхідного сигналу (FromRegToMotor) максимальне і
мінімальне (відповідно X та X ) і зафіксувати їх у своїх робочих записах.
max min
2.6. Розрахувати значення k і Т 0 за формулами (3.3) і (3.4), записати отриману
передавадбну функцію двигуна.
2.7. Отримані значення k і Т 0 ввести в тренажер як параметри інтегральної ланки (
Params for integral link) відповідно b 0i та a 1 (рис. 3.3).
2.8. Ввести ці значення в роботу тренажера шляхом натискання кнопки Set.
2.9. Запустити тренажер натисканням кнопки run.
2.10. Порівняти графічні залежності ідеального сигналу SpeedPosition і вихідного
сигналу двигуна з отриманою передавальною функцією MeasurSpeed.
2.11. Визначити відхилення вихідного сигналу двигуна від ідеального сигналу і
розрахувати похибку за формулою (3.5).
2.12. Якщо похибка перевищує 5 %, то необхідно розрахувати уточнені значення k і Т 0 і
повторити виконання п. 3.6. – 3.11 для зменшення похибки.
2.13. Записати остаточний вид передавальної функції двигуна.
4. Оформлення звіту.
Звіт повинен містити: тему роботи; зображення з екрану задаючого, ідеального та
отриманого вихідного сигналу двигуна, передавальну функцію двигуна з отриманими значеннями
її коефіцієнтів.
Контрольні питання:
1. Що таке крива розгону і які за формою можуть бути криві розгону для відомих лінійних
елементів і САК?
2. У чому суть методу наближених моделей?
3. Як впливає зміна коефіцієнта пропорційності на вихідний сигнал об’єкта керування?
4. Яким чином оцінюють точність визначення коефіцієнтів передавальної функції,
одержаної на основі кривої розгону?
22