
Page 17 - 4733
P. 17
Лабораторна робота № 2
ДОСЛІДЖЕННЯ ЧАСТОТНИХ ХАРАКТЕРИСТИК ДИНАМІЧНИХ ЛАНОК
ПРИ РЕГУЛЮВАННІ ПОЗИЦІЇ ВАЛА ДВИГУНА ПОСТІЙНОГО СТРУМУ
1. Загальні положення
При подачі на вхід лінійного елемента гармонійного сигналу tx )( x sin t на його виході
m
після перебігу перехідного процесу встановлюються гармонійні вимушені коливання
y t ) ( y sin( t ) з тією ж частотою , але з іншими значеннями амплітуди і фази. Величини y m і
m
залежать як від , так і від типу та параметрів елемента. Тому властивості елемента можна
оцінювати за частотними характеристиками, які визначають залежність відношення амплітуд y m/x m
та фазового зсуву від частоти гармонійних коливань. Основною частотною характеристикою
регулятора є амплітудно-частотна характеристика (АЧХ) - залежність відношення амплітуд
вихідного і вхідного сигналів від частоти, яка показує, як елемент пропускає сигнали різної
частоти. Метою даного практикуму є отримання практичних навичок аналізу властивостей
регулятора САК шляхом вивчення його АЧХ.
2. Порядок виконання роботи:
1. Дослідити АЧХ пропорційної ланки:
1.1. Зайти за допомогою веб-переглядача на адресу www.vlab.nung.edu.ua/SAC.
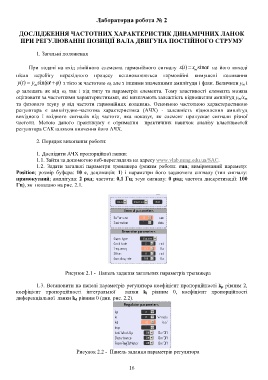
1.2. Задати загальні параметри тренажера (режим роботи: run; вимірюваний параметр:
Position; розмір буфера: 10 с, децимація: 1) і параметри його задаючого сигналу (тип сигналу:
прямокутний; амплітуда: 2 рад; частота: 0,1 Гц; зсув сигналу: 0 рад; частота дискретизації: 100
Гц), як показано на рис. 2.1.
Рисунок 2.1 - Панель задання загальних параметрів тренажера
1.3. Встановити на панелі параметрів регулятора коефіцієнт пропорційності k p рівним 2,
коефіцієнт пропорційності інтегральної ланки k і рівним 0, коефіцієнт пропорційності
диференціальної ланки k d рівним 0 (див. рис. 2.2).
Рисунок 2.2 - Панель задання параметрів регулятора
16