
Page 25 - 460
P. 25
26
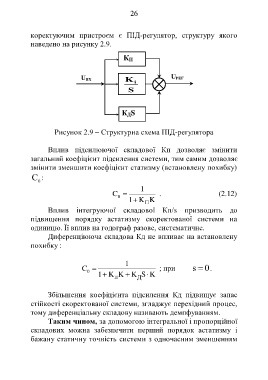
коректуючим пристроєм є ПІД-регулятор, структуру якого
наведено на рисунку 2.9.
К П
U ВХ K і U РЕГ
S
К ДS
Рисунок 2.9 – Структурна схема ПІД-регулятора
Вплив підсилюючої складової Кп дозволяє змінити
загальний коефіцієнт підсилення системи, тим самим дозволяє
змінити зменшити коефіцієнт статизму (встановлену похибку)
C :
0
1
C 0 . (2.12)
1 K K
Вплив інтегруючої складової Кп/s призводить до
підвищення порядку астатизму скоректованої системи на
одиницю. Її вплив на годограф разове, систематичне.
Диференціююча складова Кд не впливає на встановлену
похибку :
1
C 0 ; при s 0.
1 K П K K Д S K
Збільшення коефіцієнта підсилення Кд підвищує запас
стійкості скоректованої системи, згладжує перехідний процес,
тому диференціальну складову називають демпфуванням.
Таким чином, за допомогою інтегральної і пропорційної
складових можна забезпечити перший порядок астатизму і
бажану статичну точність системи з одночасним зменшенням