
Page 18 - 460
P. 18
19
Система з інтегральним управлінням менш чутлива до
високочастотних перешкод в порівнянні з системами, які
реагують на похідні.
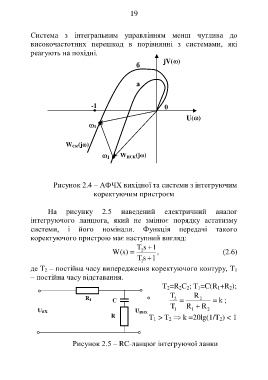
б jV( )
а
-1 0
U( )
1
W СК(j )
1 W НСК(j )
Рисунок 2.4 – АФЧХ вихідної та системи з інтегруючим
коректуючим пристроєм
На рисунку 2.5 наведений електричний аналог
інтегруючого ланцюга, який не змінює порядку астатизму
системи, і його номінали. Функція передачі такого
коректуючого пристрою має наступний вигляд:
T s 1
W ) s ( 2 , (2.6)
T 1 s 1
де T 2 – постійна часу випередження коректуючого контуру, T 1
– постійна часу відставання.
T 2=R 2C 2; T 1=C(R 1+R 2);
T R
2 2 k ;
R 1
C
T R R
U ВХ U ВИХ 1 1 2
T 1 > T 2 k =20lg(1/T 2) < 1
R
2
Рисунок 2.5 – RC-ланцюг інтегруючої ланки