
Page 17 - 460
P. 17
18
диференціючої і звичної інерційної ланок. Тому, все сказане
вище про вплив ідеальної пропорційно-диференційної ланки
на стійкість і якість перехідного процесу справедливо і для
інерційної ланки такого типу з тією лише різницею, що
остання ланка повільніше впливає на швидкодію системи і
відповідно на її стійкість.
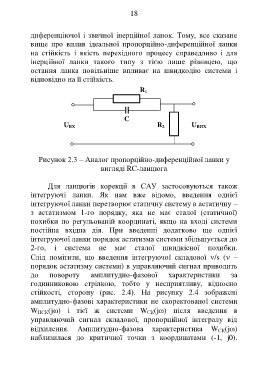
R 1
C
U ВХ R 2 U ВИХ
Рисунок 2.3 – Аналог пропорційно-диференційної ланки у
вигляді RC-ланцюга
Для ланцюгів корекції в САУ застосовуються також
інтегруючі ланки. Як нам вже відомо, введення однієї
інтегруючої ланки перетворює статичну систему в астатичну –
з астатизмом 1-го порядку, яка не має сталої (статичної)
похибки по регульованій координаті, якщо на вході системи
постійна вхідна дія. При введенні додатково ще однієї
інтегруючої ланки порядок астатизма системи збільшується до
2-го, і система не має сталої швидкісної похибки.
Слід помітити, що введення інтегруючої складової /s ( –
порядок астатизму системи) в управляючий сигнал приводить
до повороту амплитудно-фазової характеристики за
годинниковою стрілкою, тобто у несприятливу, відносно
стійкості, сторону (рис. 2.4). На рисунку 2.4 зображені
амплитудно-фазові характеристики не скоректованої системи
W НСК(j ) і тієї ж системи W СК(j ) після введення в
управляючий сигнал складової, пропорційної інтегралу від
відхилення. Амплитудно-фазова характеристика W СК(j )
наблизилася до критичної точки з координатами (-1, j0).