
Page 16 - 460
P. 16
17
k Д і частоти . Це якраз і є необхідним для того, щоб крива б
не охоплювала точку з координатами (-1,j0), тобто щоб
система стала стійкою.
При правильно вибраному значенні k Д можна зробити
систему не тільки стійкою, але і добитися найкращої можливої
для даної системи процесів регулювання або управління. Слід
зазначити, що при введенні похідних система стає більш
чутливою до високо частотних перешкод.
h k Д2 k Д1 k Д2 > k Д1
t Д2 < t Д1
0
t
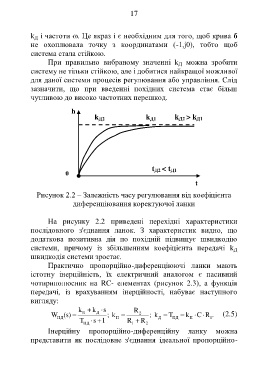
Рисунок 2.2 – Залежність часу регулювання від коефіцієнта
диференціювання коректуючої ланки
На рисунку 2.2 приведені перехідні характеристики
послідовного з'єднання ланок. З характеристик видно, що
додаткова позитивна дія по похідній підвищує швидкодію
системи, причому із збільшенням коефіцієнта передачі k Д
швидкодія системи зростає.
Практично пропорційно-диференціюючі ланки мають
істотну інерційність, їх електричний аналогом є пасивний
чотириполюсник на RC- елементах (рисунок 2.3), а функція
передачі, із врахуванням інерційності, набуває наступного
вигляду:
k k s R
W (s) П Д ; k 2 ; k T k C R . (2.5)
ПД T ПД s 1 П R 1 R 2 Д ПД П 1
Інерційну пропорційно-диференційну ланку можна
представити як послідовне з'єднання ідеальної пропорційно-