
Page 15 - 460
P. 15
16
Покажемо за допомогою амплитудно-фазових
характеристик (АФЧХ), який ефект може бути досягнутий при
введенні похідної в систему автоматичного управління. На
рисунку 2.1 (крива а) зображена амплитудно-фазова
характеристика нестійкої САУ. При включенні пропорційно-
диференціючої ланки амплитудно-фазова характеристика
системи прийме вигляд:
X j ( )
W СК(j )= ВИХ =(k П+k Д j ) W НСК(j ), (2.3)
X ВХ j ( )
Якщо k П=1, тоді вираз (2.3) приймає наступний вигляд:
W СК(j )=(1+k Д j ) W НСК(j )=W НСК(j )+k Д(j ) W НСК(j ),
(2.4)
а jV( )
б
-1 0
U( )
1
/2
W НСК(j )
1 W СК(j )
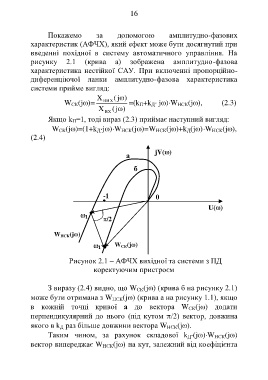
Рисунок 2.1 – АФЧХ вихідної та системи з ПД
коректуючим пристроєм
З виразу (2.4) видно, що W СК(j ) (крива б на рисунку 2.1)
може бути отримана з W НСК(j ) (крива а на рисунку 1.1), якщо
в кожній точці кривої а до вектора W СК(j ) додати
перпендикулярний до нього (під кутом /2) вектор, довжина
якого в k Д раз більше довжини вектора W НСК(j ).
Таким чином, за рахунок складової k Д (j ) W НСК(j )
вектор випереджає W НСК(j ) на кут, залежний від коефіцієнта