
Page 78 - 4399
P. 78
6.3 Математичний, пружинний та фізичний
маятники
Прикладом гармонічних коливань може бути
коливання маятника при малих кутових відхиленнях від
положення рівноваги.
Маятником називають тіло, що коливається під дією
сили тяжіння F mg . Розглянемо математичний, фізичний і
пружинний маятники.
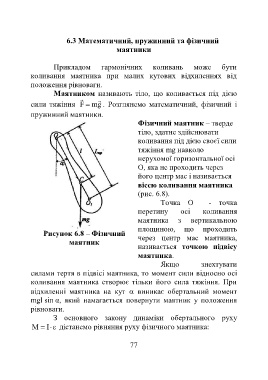
Фізичний маятник – тверде
тіло, здатне здійснювати
коливання під дією своєї сили
тяжіння mg навколо
нерухомої горизонтальної осі
О, яка не проходить через
його центр мас і називається
віссю коливання маятника
(рис. 6.8).
Точка О - точка
перетину осі коливання
маятника з вертикальною
площиною, що проходить
Рисунок 6.8 – Фізичний
через центр мас маятника,
маятник
називається точкою підвісу
маятника.
Якщо знехтувати
силами тертя в підвісі маятника, то момент сили відносно осі
коливання маятника створює тільки його сила тяжіння. При
відхиленні маятника на кут виникає обертальний момент
mgl sin α, який намагається повернути маятник у положення
рівноваги.
З основного закону динаміки обертального руху
M дістанемо рівняння руху фізичного маятника:
I
77