
Page 14 - 4357
P. 14
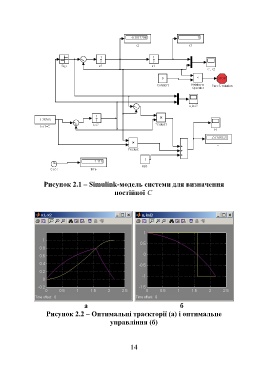
Рисунок 2.1 – Simulink-модель системи для визначення
постійної C
а б
Рисунок 2.2 – Оптимальні траєкторії (а) і оптимальне
управління (б)
14