
Page 18 - 4357
P. 18
Сформулюємо отримані результати. Для цього визначимо
рівняння лінії переключення. Це можна зробити, об'єднуючи
рівняння (2.22) і (2.29) при k 0 і k :
0
1
2
x 2 ln x 2 1 при x 2 0,
x (2.30)
1
x 2 ln x 2 1 при x 2 0,
чи
x x sign ()lnx 2 x sign ()x 2 . (2.31)
1
2
2
Використовуючи (2.22), запишемо закон управління:
()
()ln x
1 при x 1 x 2 sign x 2 2 sign x 2 0,
x x ln x 1 0 i x 0 (
u 1 2 2 2 ), (2.32)
()ln x
()
1 при x 1 x 2 sign x 2 2 sign x 2 0,
-
x 1 x 2 ln x 2 1 0 i x 2 0 ( ).
Для спрощення закону управління виключимо з (2.32)
умови, що стосуються руху по траєкторіях , . Це виправдано
також тим, що точно реалізувати контроль знаходження об'єкту
на цих траєкторіях технічно неможливо, оскільки для цього буде
потрібно абсолютно точні виміри. Остаточно отримаємо:
u sign 1 x sign ()lnx 2 x sign ()x 2 x
2
2
sign x 1 x 2 sign ( )lnx 2 x 2 sign ( ) .x 2 (2.33)
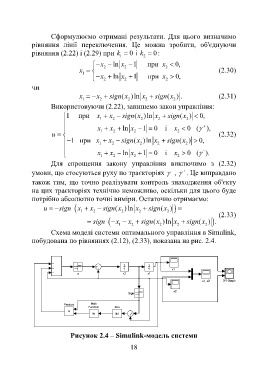
Схема моделі системи оптимального управління в Simulink,
побудована по рівняннях (2.12), (2.33), показана на рис. 2.4.
Рисунок 2.4 – Simulink-модель системи
18