
Page 125 - 2589
P. 125
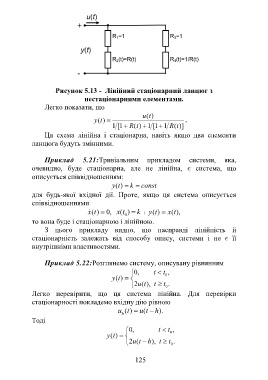
Рисунок 5.13 - Лінійний стаціонарний ланцюг з
нестаціонарними елементами.
Легко показати, що
u (t )
y (t ) .
1 1 [ R (t ) 1 1 [ 1 R (t ] )
Ця схема лінійна і стаціонарна, навіть якщо два елементи
ланцюга будуть змінними.
Приклад 5.21:Тривіальним прикладом системи, яка,
очевидно, буде стаціонарна, але не лінійна, є система, що
описується співвідношенням:
y( t ) k const
для будь-якої вхідної дії. Проте, якщо ця система описується
співвідношеннями
x (t ) , 0 tx( ) k і (ty ) x (t ),
0
то вона буде і стаціонарною і лінійною.
З цього прикладу видно, що насправді лінійність й
стаціонарність залежать від способу опису, системи і не є її
внутрішніми властивостями.
Приклад 5.22:Розглянемо систему, описувану рівнянням
,0 t ,t 0
y (t )
2u (t ), t .t 0
Легко перевірити, що ця система лінійна. Для перевірки
стаціонарності покладемо вхідну дію рівною
u (t ) u (t h ).
h
Тоді
,0 t ,t 0
y (t )
2u (t ), th .t 0
125