
Page 378 - 256_
P. 378
де y H ; вихідна координата об’єкта; f G - збурення,
S gH ) 0 (
що діє на об’єкт; u U - керуючий вплив; T
u ( ) 0 ( g )
gH ) 0 ( ( u) gH ) 0 (
стала часу об’єкта K ; K ,
G ) 0 ( ) 0 (
( u ) g u 0 ( u ) g
K , K - передавальні коефіцієнти об’єкта за
G
збуренням і керуючим впливом; індекс “0” вказує на те, що
значення відповідних величин відповідає усталеному режиму
роботи об’єкта.
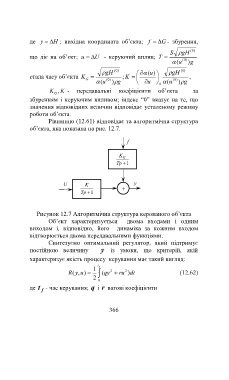
Рівнянню (12.61) відповідає та алгоритмічна структура
об’єкта, яка показана на рис. 12.7.
f
K G
Tp 1
U K – y
+
Tp 1
Рисунок 12.7 Алгоритмічна структура керованого об’єкта
Об’єкт характеризується двома входами і одним
виходом і, відповідно, його динаміка за кожним входом
відтворюється двома передавальними функціями.
Синтезуємо оптимальний регулятор, який підтримує
постійною величину y із умови, що критерій, якій
характеризує якість процесу керування має такий вигляд:
f t
1 2 2
R( y, u) ( qy ru ) dt (12.62)
2
0
де t - час керування; q і r вагові коефіцієнти
f
366