
Page 369 - 256_
P. 369
y C x
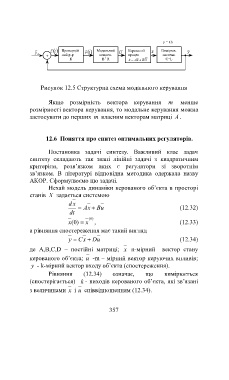
y t Пропорцій tr Модальний U Керований x Вимірюв. y
d ний р-р компен. процес система
+ -1
– К В R С=L
Рисунок 12.5 Структурна схема модального керування
Якщо розмірність вектора керування m менше
розмірності вектора керування, то модальне керування можна
застосувати до перших m власним векторам матриці A .
12.6 Поняття про синтез оптимальних регуляторів.
Постановка задачі синтезу. Важливий клас задач
синтезу складають так звані лінійні задачі з квадратичним
критерієм, розв’язком яких є регулятори зі зворотнім
зв’язком. В літературі відповідна методика одержала назву
АКОР. Сформулюємо цю задачі.
Нехай модель динаміки керованого об’єкта в просторі
станів X задається системою
d x
A x B u (12.32)
dt
) 0 (
) 0 ( x x , (12.33)
а рівняння спостереження має такий вигляд
y C x D u (12.34)
де А,В,С,D – постійні матриці; x n-мірний вектор стану
керованого об’єкта; u -m – мірний вектор керуючих впливів;
y - k-мірний вектор входу об’єкта (спостереження).
Рівняння (12.34) означає, що вимірюється
(спостерігається) k - виходів керованого об’єкта, які зв’язані
з величинами x і u співвідношенням (12.34).
357