
Page 360 - 256_
P. 360
f
W 0 (p)
(2)
x
2
y t tr U t x y
(1)
d W p (p) W к (p) W 0 (p) 1
+ +
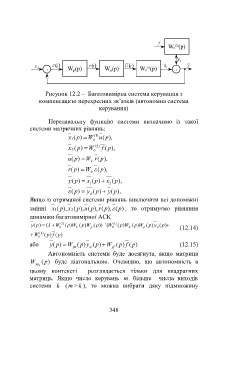
Рисунок 12.2 – Багатовимірна система керування з
компенсацією перехресних зв’язків (автономна система
керування)
Передавальну функцію системи визначимо із такої
системи матричних рівнянь:
1 x (p ) W ) 1 ( u (p ),
0
2 x (p ) W 0 ) 2 ( f (p ),
u ( p ) W k r (p ),
r (p ) W (p ),
p
( y ) p x ( ) p x (p ),
1 2
( ) p y ( ) p y (p ),
d
Якщо із отриманої системи рівнянь виключити всі допоміжні
змінні x 1 (p ), x 2 ( p ),u (p ),r (p ), ( ) p , то отримуємо рівняння
динаміки багатовимірної АСК
( y ) p (I W 0 ) 1 ( (p )W k ( p )W p ( p )) 1 (W 0 ) 1 ( (p )W k (p )W p (p )y d ( ) p (12.14)
W ) 2 ( ( ) p ( f ) p
0
або y ( p ) W yu ( p )y d (p ) W yf ( ) p ( f ) p (12.15)
Автономність системи буде досягнута, якщо матриця
W ( ) p буде діагональною. Очевидно, що автономність в
yy
d
цьому контексті розглядається тільки для квадратних
матриць. Якщо число керувань m більше числа виходів
системи k (m > k ), то можна вибрати дяку підмножину
348