
Page 190 - 256_
P. 190
K T p 1
W p H . (6.20)
T H p
Реальна диференціююча ланка реалізується поєднанням
жорсткого від’ємного і інерційного додатнього зворотніх зв'язків.
Такий зворотний зв'язок в цілому називається пружним або
ізодромним. Тому ПІ-регулятори часто називають ізодромними, а
їх параметр налаштування Т і — часом ізодрому: На рис. 6.10
пунктиром показаний закон регулювання реального ПІ-
регулятора.
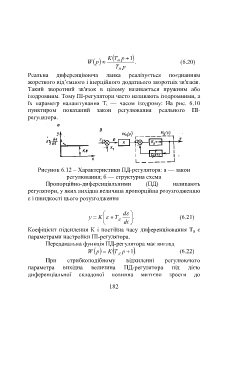
Рисунок 6.12 – Характеристики ПД-регулятора: а — закон
регулювання; б — структурна схема
Пропорційно-диференціальними (ПД) називають
регулятори, у яких вихідна величина пропорційна розузгодженню
і швидкості цього розузгодження
d
y K T Д . (6.21)
dt
Коефіцієнт підсилення К і постійна часу диференціювання Т д є
параметрами настройки ПІ-регулятора.
Передавальна функція ПД-регулятора має вигляд
W Kp Т р . 1 (6.22)
Д
При стрибкоподібному відхиленні регулюючого
параметра вихідна величина ПД-регулятора під дією
диференціальної складової повинна миттєво зрости до
182