
Page 187 - 256_
P. 187
Типовий графік перехідного процесу в системі з І-
регулятором при стрибкоподібній зміні збурення z показаний на
рис. 6.9, в. Тут же приведений вид перехідного процесу в
статичному об'єкті регулювання без регулятора (крива 1).
Перевагою І-регулятора в порівнянні з П-регулятором є
відсутність статичної нерівномірності.
Недоліки І-регулятора обумовлені їх динамічними
властивостями. Як би малим не було розузгодження , І-
регулятор буде продовжуватиме переміщати регулюючий орган
аж до крайнього положення. Напрям руху регулюючого органу
змінюється лише у тому випадку, коли поточне значення
регулюючого параметра, змінюючись, переходить через задане
значення.
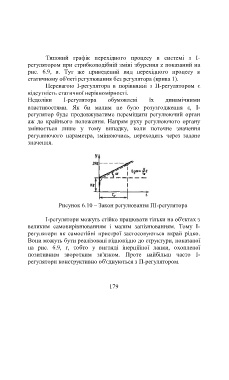
Рисунок 6.10 – Закон регулювання ПІ-регулятора
І-регулятори можуть стійко працювати тільки на об'єктах з
великим самовирівнюванням і малим запізнюванням. Тому І-
регулятори як самостійні пристрої застосовуються вкрай рідко.
Вони можуть бути реалізовані відповідно до структури, показаної
на рис. 6.9, г, тобто у вигляді інерційної ланки, охопленої
позитивним зворотним зв'язком. Проте найбільш часто І-
регулятори конструктивно об'єднуються з П-регулятором.
179