
Page 189 - 256_
P. 189
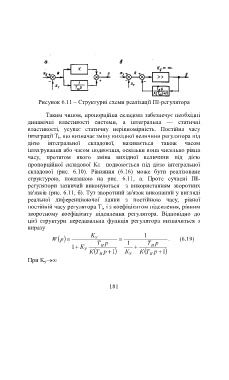
Рисунок 6.11 – Структурні схеми реалізації ПІ-регулятора
Таким чином, пропорційна складова забезпечує необхідні
динамічні властивості системи, а інтегральна — статичні
властивості, усуває статичну нерівномірність. Постійна часу
інтеграції Т і, що визначає зміну вихідної величини регулятора під
дією інтегральної складової, називається також часом
інтегрування або часом подвоєння, оскільки вона чисельно рівна
часу, протягом якого зміна вихідної величини під дією
пропорційної складової К подвоюється під дією інтегральної
складової (рис. 6.10). Рівняння (6.16) може бути реалізоване
структурою, показаною на рис. 6.11, а. Проте сучасні ПІ-
регулятори зазвичай виконуються з використанням зворотних
зв'язків (рис. 6.11, б). Тут зворотний зв'язок виконаний у вигляді
реальної диференціюючої ланки з постійною часу, рівної
постійній часу регулятора Т і, і з коефіцієнтом підсилення, рівним
зворотному коефіцієнту підсилення регулятора. Відповідно до
цієї структури передавальна функція регулятора визначиться з
виразу
K 1
W p У . (6.19)
Т р 1 Т р
1 К Н Н
У
К Т р 1 К К Т р 1
Н У Н
При K у
181