
Page 191 - 256_
P. 191
нескінченно великої величини і також миттєво зменшитися до
значення, що визначається пропорційною складовою (рис. 6.12).
Проте, оскільки в реальних регуляторах неможливі миттєві
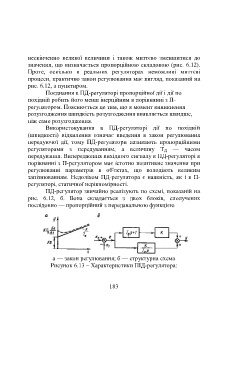
процеси, практично закон регулювання має вигляд, показаний на
рис. 6.12, а пунктиром.
Поєднання в ПД-регуляторі пропорційної дії і дії по
похідній робить його менш інерційним в порівнянні з П-
регулятором. Пояснюється це тим, що в момент виникнення
розузгодження швидкість розузгодження виявляється швидше,
ніж саме розузгодження.
Використовування в ПД-регуляторі дії по похідній
(швидкості) відхилення означає введення в закон регулювання
передуючої дії, тому ПД-регулятори називають пропорційними
регуляторами з передуванням, а величину Т Д — часом
передування. Випередження вихідного сигналу в ПД-регуляторі в
порівнянні з П-регулятором має істотно позитивне значення при
регулюванні параметрів в об'єктах, що володіють великим
запізнюванням. Недоліком ПД-регулятора є наявність, як і в П-
регуляторі, статичної нерівномірності.
ПД-регулятор звичайно реалізують по схемі, показаній на
рис. 6.12, б. Вона складається з двох блоків, сполучених
послідовно — пропорційний з передавальною функцією
а — закон регулювання; б — структурна схема
Рисунок 6.13 – Характеристики ПІД-регулятора:
183