
Page 186 - 256_
P. 186
Звідси видно, що відхилення регулюючого параметра
пропорційне не значенню вихідної величини, а її швидкості.
Отже, в стані рівноваги при dy/dt=0, розузгодження також рівне
нулю. Таким чином, при всякому відхиленні регулюючого
параметра від заданого вихідна величина І-регулятора
змінюватиметься до тих пір, поки це відхилення не буде рівне
нулю. Це можливо при будь-кому значеню збурення
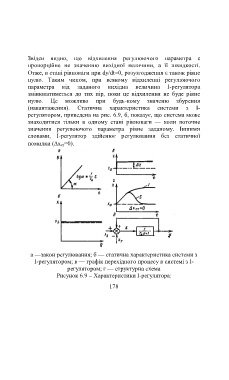
(навантаження). Статична характеристика системи з І-
регулятором, приведена на рис. 6.9, б, показує, що система може
знаходитися тільки в одному стані рівноваги — коли поточне
значення регулюючого параметра рівне заданому. Іншими
словами, І-регулятор здійснює регулювання без статичної
помилки (х ст=0).
а —закон регулювання; б — статична характеристика системи з
І-регулятором; в — графік перехідного процесу в системі з І-
регулятором; г — структурна схема
Рисунок 6.9 – Характеристики І-регулятора:
178