
Page 184 - 256_
P. 184
Разом з тим на практиці як параметр настройки П-регулятора
використовується величина, зворотна коефіцієнту підсилення К,
виражена у відсотках:
/ 1 K 100 %. (6.9)
Величина називається межею пропорційності
регулятора. Вона визначає інтервал зміни регулюючого
параметра (вираженого у відсотках), що викликає зміни вихідної
величини регулятора від одного крайнього значення до іншого
(рис. 6.7, г). Настройка межі пропорційності на значення більше
100 % означає, що вихідна величина регулятора не досягає своїх
крайніх значень при зміні регулюючого параметра у всьому
діапазоні. Згідно рівнянню (6.6) при рівності поточного і
заданого значень регулюючого параметра (=х з–х Т=0) вихідна
величина регулятора рівна нулю, тобто регулюючий орган
виконавчого пристрою повинен займати одне з своїх крайніх
положень.
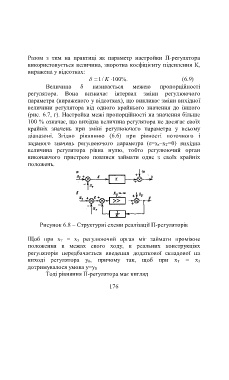
Рисунок 6.8 – Структурні схеми реалізації П-регуляторів
Щоб при х Т = х 3 регулюючий орган міг займати проміжне
положення в межах свого ходу, в реальних конструкціях
регуляторів передбачається введення додаткової складової на
виході регулятора у 0, причому так, щоб при х Т = х 3
дотримувалося умова у=у 0
Тоді рівняння П-регулятора має вигляд
176