
Page 73 - 79
P. 73
Теоретична механіка. Динаміка
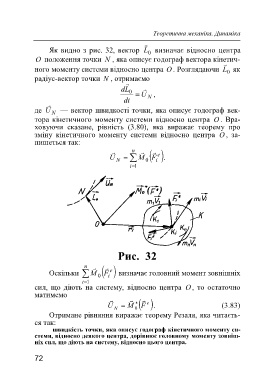
Як видно з рис. 32, вектор L визначає відносно центра
0
O положення точки N , яка описує годограф вектора кінетич-
ного моменту системи відносно центра O . Розглядаючи L як
0
радіус-вектор точки N , отримаємо
d L 0
U ,
N
dt
де U — вектор швидкості точки, яка описує годограф век-
N
тора кінетичного моменту системи відносно центра O . Вра-
ховуючи сказане, рівність (3.80), яка виражає теорему про
зміну кінетичного моменту системи відносно центра O , за-
пишеться так:
n
e
U N M 0 .
F
i
i 1
Рис. 32
n
e
F
Оскільки M 0 визначає головний момент зовнішніх
i
i 1
сил, що діють на систему, відносно центра O , то остаточно
матимемо
U M F e . (3.83)
N 0
Отримане рівняння виражає теорему Резаля, яка читаєть-
ся так:
швидкість точки, яка описує годограф кінетичного моменту си-
стеми, відносно деякого центра, дорівнює головному моменту зовніш-
ніх сил, що діють на систему, відносно цього центра.
72