
Page 171 - 79
P. 171
Загальні теореми динаміки
або об’ємом V , який звільняє цей поршень. В першому випа-
дку узагальненою координатою буде x , в другому — V .
Оскільки основними вимогами до узагальнених координат є їх
незалежність, і щоб вони однозначно визначали положення
системи в просторі, кількість узагальнених координат для го-
лономних систем визначається числом ступенів вільності сис-
теми. Так, кривошипно-шатунний механізм (рис.65) має один
ступінь вільності і положення його точок однозначно визнача-
ється заданням тільки кута повороту кривошипа. Цей кут мо-
жна прийняти за узагальнену координату даного механізму.
Рис. 65
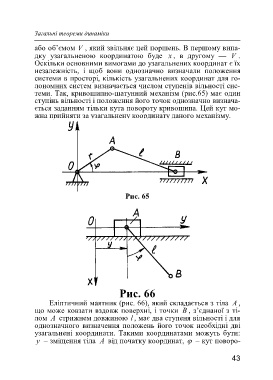
Рис. 66
Еліптичний маятник (рис. 66), який складається з тіла A ,
що може ковзати вздовж поверхні, і точки B , з’єднаної з ті-
лом A стрижнем довжиною l , має два ступеня вільності і для
однозначного визначення положень його точок необхідні дві
узагальнені координати. Такими координатами можуть бути:
y – зміщення тіла A від початку координат, – кут поворо-
43