
Page 195 - 68
P. 195
Кінематика
§ 47 Обертання твердого тіла навколо нерухомої точки
Обертанням твердого тіла навколо нерухомої точки
називається такий його рух, при якому протягом
усього часу руху одна точка тіла залишається неру-
хомою.
Цей рух часто називають сферичним, оскільки траєкторії
всіх точок тіла розміщаються на поверхнях сфер, центри яких
знаходяться у нерухомій точці.
Вільне тверде тіло має шість ступенів вільності. Закріп-
лення однієї точки тіла зменшує число ступенів вільності на
три одиниці, а це означає, що тіло, котре обертається навколо
нерухомої точки, має три ступені вільності. Отже, для одно-
значного визначення його положення в просторі необхідні як
мінімум три параметри. Їх можна вибрати по-різному. В тео-
ретичній механіці, як і в більшості дисциплін, найбільш ши-
роке застосування отримали кути, які були запропоновані Ей-
лером.
§ 47.1 Кути Ейлера. Рівняння обертання твердого тіла на-
вколо нерухомої точки
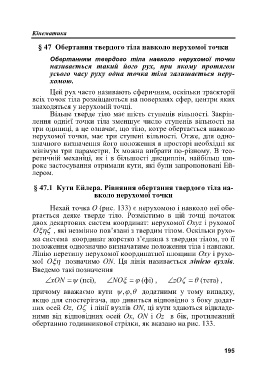
Нехай точка О (рис. 133) є нерухомою і навколо неї обе-
ртається деяке тверде тіло. Розмістимо в цій точці початок
двох декартових систем координат: нерухомої Оxyz і рухомої
O , які незмінно пов’язані з твердим тілом. Оскільки рухо-
ма система координат жорстко з’єднана з твердим тілом, то її
положення однозначно визначатиме положення тіла і навпаки.
Лінію перетину нерухомої координатної площини Оxy і рухо-
мої O позначимо ON. Ця лінія називається лінією вузлів.
Введемо такі позначення
xON (псі), NO (фі) , zO (тета) ,
причому вважаємо кути , , додатними у тому випадку,
якщо для спостерігача, що дивиться відповідно з боку додат-
них осей Oz, O і лінії вузлів ON, ці кути здаються відкладе-
ними від відповідних осей Оx, ON і Oz в бік, протилежний
обертанню годинникової стрілки, як вказано на рис. 133.
195