
Page 169 - 68
P. 169
Кінематика
– паралелепіпед), основа якої довільно переміщається по не-
рухомій площині Н. При такому русі всі її точки переміща-
ються в площинах, паралельних площині Н. Плоскопаралель-
ний рух широко розповсюджений в техніці. Переважна біль-
шість механізмів, які зустрічаються на практиці, є сукупністю
твердих тіл, що з’єднані між собою, і рухаються паралельно
деякій площині, тобто здійснюють плоскопаралельний рух.
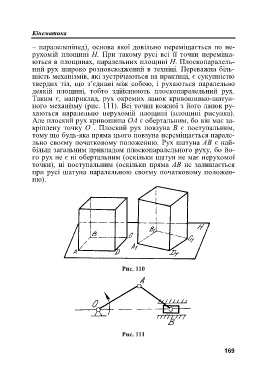
Таким є, наприклад, рух окремих ланок кривошипно-шатун-
ного механізму (рис. 111). Всі точки кожної з його ланок ру-
хаються паралельно нерухомій площині (площині рисунка).
Але плоский рух кривошипа ОА є обертальним, бо він має за-
кріплену точку О . Плоский рух повзуна В є поступальним,
тому що будь-яка пряма цього повзуна переміщається парале-
льно своєму початковому положенню. Рух шатуна АВ є най-
більш загальним прикладом плоскопаралельного руху, бо йо-
го рух не є ні обертальним (оскільки шатун не має нерухомої
точки), ні поступальним (оскільки пряма АВ не залишається
при русі шатуна паралельною своєму початковому положен-
ню).
Рис. 110
Рис. 111
169