
Page 166 - 68
P. 166
Теоретична механіка
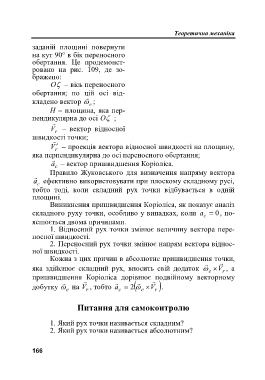
заданій площині повернути
на кут 90 в бік переносного
обертання. Це продемонст-
ровано на рис. 109, де зо-
бражено:
O – вісь переносного
обертання; по цій осі від-
кладено вектор ;
e
Н – площина, яка пер-
пендикулярна до осі O ;
V – вектор відносної
r
швидкості точки;
V – проекція вектора відносної швидкості на площину,
r
яка перпендикулярна до осі переносного обертання;
a – вектор пришвидшення Коріоліса.
c
Правило Жуковського для визначення напряму вектора
a ефективно використовувати при плоскому складному русі,
c
тобто тоді, коли складний рух точки відбувається в одній
площині.
Виникнення пришвидшення Коріоліса, як показує аналіз
складного руху точки, особливо у випадках, коли a 0, по-
c
яснюється двома причинами.
1. Відносний рух точки змінює величину вектора пере-
носної швидкості.
2. Переносний рух точки змінює напрям вектора віднос-
ної швидкості.
Кожна з цих причин в абсолютне пришвидшення точки,
яка здійснює складний рух, вносить свій додаток e V , а
r
пришвидшення Коріоліса дорівнює подвійному векторному
добутку на V , тобто a 2 e V r .
c
e
r
Питання для самоконтролю
1. Який рух точки називається складним?
2. Який рух точки називається абсолютним?
166