
Page 165 - 68
P. 165
Кінематика
1) коли 0 , тобто у випадку поступального перенос-
e
ного руху або в момент, коли кутова швидкість непоступаль-
ного руху дорівнює нулеві;
2) коли V 0 , тобто у момент часу відносного спокою
r
точки;
3) коли sin ,V 0 , тобто у випадку, коли V || , а
e r r e
це означає, що вектор відносної швидкості точки паралельний
до осі переносного обертання.
В кожному з цих випадків формула (2.59) набуває ви-
гляду
a a a . (2.62)
e r
Оскільки другий і третій випадок отримуємо найчастіше
тільки в деякий момент часу, то формулу (2.62) застосовують
при визначенні пришвидшення точки, яка здійснює складний
рух у випадку переносного поступального руху.
Отже,
абсолютне пришвидшення точки, яка здійснює
складний рух, у випадку переносного поступального
руху дорівнює геометричній сумі її переносного і
відносного пришвидшень.
Напрям вектора пришвидшення Коріоліса можна визна-
чити двома способами:
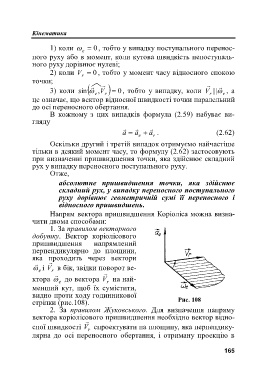
1. За правилом векторного
добутку. Вектор коріолісового
пришвидшення напрямлений
перпендикулярно до площини,
яка проходить через вектори
і V в бік, звідки поворот ве-
r
e
ктора до вектора V на най-
e
r
менший кут, щоб їх сумістити,
видно проти ходу годинникової
стрілки (рис.108). Рис. 108
2. За правилом Жуковського. Для визначення напряму
вектора коріолісового пришвидшення необхідно вектор відно-
сної швидкості V спроектувати на площину, яка перпендику-
r
лярна до осі переносного обертання, і отриману проекцію в
165