
Page 43 - 4845
P. 43
вихідної ланки за один цикл руху вхідної ланки.
Розглянемо побудову таких положень.
Графічний розв’язок
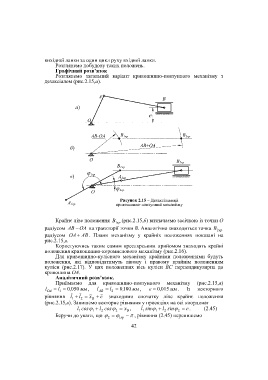
Розглянемо загальний варіант кривошипно-повзунного механізму з
дезаксіалом (рис.2.15,а).
А В
а)
е
О
АВ-ОА В 1кр В 2кр
АВ+ОА
б)
О
В 2кр
В 1кр
φ 1кр
в) А 2кр
φ 2кр
О
Рисунок 2.15 – Дезаксіальний
А 1кр
кривошипно-повзунний механізму
Крайнє ліве положення В 1 кр (рис.2.15,б) визначаємо засічкою із точки О
радіусом АВ ОА на траєкторії точки В. Аналогічно знаходиться точка В 2 кр
радіусом ОА АВ . Плани механізму у крайніх положеннях показані на
рис.2.15,в.
Користуючись таким самим креслярським прийомом знаходять крайні
положення кривошипно-коромислового механізму (рис.2.16).
Для кривошипно-кулісного механізму крайніми положеннями будуть
положення, які відповідатимуть лівому і правому крайнім положенням
куліси (рис.2.17). У цих положеннях вісь куліси ВС перпендикулярна до
кривошипа ОА.
Аналітичний розв’язок.
Приймаємо для кривошипно-повзунного механізму (рис.2.15,а)
l OA l 0 ,050 мм, l AВ l 0 ,180 мм , е 0 ,015 мм . Із векторного
2
1
рівняння l l x e знаходимо спочатку ліве крайнє положення
2
1
B
(рис.2.15,в). Запишемо векторне рівняння у проекціях на осі координат
l 1 cos 1 l 2 cos 2 x , l 1 sin 1 l 2 sin 2 e . (2.45)
B
Беручи до уваги, що кр , рівняння (2.45) перепишемо
2
1
42