
Page 47 - 4621
P. 47
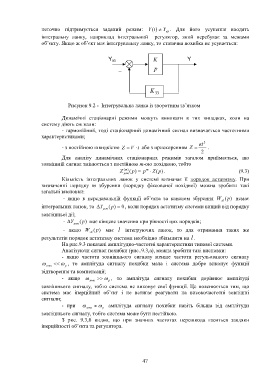
неточно підтримується заданий режим: Y( t ) Y . Для його усунення вводять
зд
інтегральну ланку, наприклад інтегральний регулятор, який перебуває за межами
об’єкту. Якщо ж об’єкт має інтегрувальну ланку, то статична похибка не усувається:
Y зд K Y
p
–
K
ЗЗ
Рисунок 9.2 - Інтегрувальна ланка із зворотним зв’язком
Динамічні стаціонарні режими можуть виникати в тих випадках, коли на
систему діють сигнали:
- гармонійний, тоді стаціонарний динамічний сигнал визначається частотними
характеристиками;
at 2
- з постійною швидкістю Z V t або з прискоренням Z .
2
Для аналізу динамічних стаціонарних режимів загалом приймається, що
зовнішній сигнал змінюється з постійною m-ою похідною, тобто
Z (m ) ( ) p p m ( Z ) p . (9.3)
уст
Кількість інтегральних ланок у системі визначає її порядок астатизму. При
визначенні порядку m збурення (порядку фіксованої похідної) можна зробити такі
загальні висновки:
- якщо в передавальній функції об’єкта за каналом збурення W ( ) p немає
зб
інтегральних ланок, то Y (p ) 0, коли порядок астатизму системи вищий від порядку
уст
зовнішньої дії;
- Y ( ) p має кінцеве значення при рівності цих порядків;
уст
- якщо W ( ) p має l інтегруючих ланок, то для отримання таких же
зб
результатів порядок астатизму системи необхідно збільшити на l .
На рис.9.3 показані амплітудно-частотні характеристики типової системи.
Аналізуючи сигнал похибки (рис..9.3,а), можна зробити такі висновки:
- якщо частота зовнішнього сигналу менше частоти регульованого сигналу
зовн , то амплітуда сигналу похибки мала і система добре виконує функції
p
відтворення та компенсації;
- якщо , то амплітуда сигналу похибки дорівнює амплітуді
зовн p
зовнішнього сигналу, тобто система не виконує свої функції. Це пояснюється тим, що
система має інерційний об’єкт і не встигає реагувати на високочастотні зовнішні
сигнали;
- при амплітуда сигналу похибки навіть більша від амплітуди
зовн p
зовнішнього сигналу, тобто система може бути нестійкою.
З рис. 9.3,б видно, що при значних частотах перешкода гаситься завдяки
інерційності об’єкта та регулятора.
47