
Page 50 - 4621
P. 50
10. ЗАКОНИ РЕГУЛЮВАННЯ В САК
У лекції розглянуто методи керування вихідним сигналом САК, які
називаються законами регулювання.
Одним із напрямків підвищення точності САК є формування потрібних законів
регулювання шляхом введення в замкнуту САК відповідних типів регуляторів.
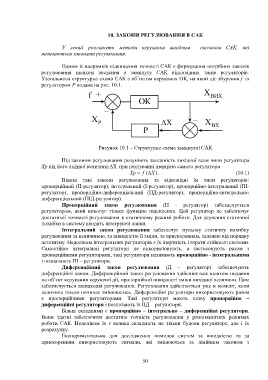
Узагальнена структурна схема САК з об’єктом керування ОК, на який діє збурення f та
регулятором Р подана на рис. 10.1.
Рисунок 10.1 – Структурна схема замкнутої САК
Під законом регулювання розуміють залежність вихідної вели чини регулятора
Хр від його вхідної величини при нехтуванні інерцією самого регулятора
Xp f ( X ) . (10.1)
Відомі такі закони регулювання та відповідні їм типи регуляторів:
пропорційний (П-регулятор), інтегральний (І-регулятор), пропорційно-інтегральний (ПІ-
регулятор), пропорційно-диференціальний (ПД-регулятор), пропорційно-інтегрально-
диференціальний (ПІД-регулятор).
Пропорційний закон регулювання (П - регулятор) забезпечується
регулятором, який виконує тільки функцію підсилення. Цей регулятор не забезпечує
достатньої точності регулювання в статичному режимі роботи. Для усунення статичної
похибки в систему вводять інтегруючі ланки.
Інтегральний закон регулювання забезпечує нульову статичну похибку
регулювання за величиною, за швидкістю її зміни, за прискоренням, залежно від порядку
астатизму. Недоліком інтегральних регуляторів є їх інертність і втрати стійкості системи.
Самостійно інтегральні регулятори не використовують, а застосовують разом з
пропорційними регуляторами, такі регулятори називають пропорційно - інтегральними
і позначають ПІ – регулятори.
Диференційний закон регулювання (Д – регулятор) забезпечують
диференційні ланки. Диференційний закон регулювання здійснюється шляхом подання
на об’єкт керування керуючої дії, пропорційної швидкості зміни вихідної величини. Цим
забезпечується швидкодія регулювання. Регулювання здійснюється уже в момент, коли
величина тільки починає змінюватись. Диференційні регулятори використовують разом
з пропорційними регуляторами. Такі регулятори мають назву пропорційно –
диференційні регулятори і позначають їх ПД – регулятори.
Більш складними є пропорційно – інтегрально – диференційні регулятори.
Вони здатні забезпечити достатню точність регулювання у різноманітних режимах
роботи САК. Недоліком їх є велика складність не тільки будови регулятора, але і їх
розрахунку.
Експериментально для дослідження помилок систем за швидкістю та за
прискоренням використовують сигнали, які змінюються за лінійним законом з
50