
Page 84 - 4523
P. 84
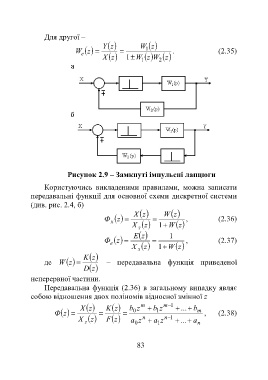
Для другої –
Y z W z
zW e 1 . (2.35)
X z 1 W 1 zWz 2
Рисунок 2.9 – Замкнуті імпульсні ланцюги
Користуючись викладеними правилами, можна записати
передавальні функції для основної схеми дискретної системи
(див. рис. 2.4, б)
X z W z
Ф x z , (2.36)
X з z 1 W z
Е z 1
Ф е z , (2.37)
X з z 1 W z
K z
де W z – передавальна функція приведеної
D z
неперервної частини.
Передавальна функція (2.36) в загальному випадку являє
собою відношення двох поліномів відносної змінної z
m
X z K z b z b z m1 ... b
zФ 0 1 m , (2.38)
n
X з z F z a 0 z a 1 z n1 ... a n
83